Personal tools
About
From Gluonpilot
Contents |
What is the gluonpilot?
The gluonpilot is an autopilot system for both
- Airplanes such as the Multiplex Funjet ("flying wing"), Easystar, Easyglider or any other one
- Quadrocopters (currently only stabilization, navigation is in development) using PWM-based brushless controllers (aka the ones you buy in China/Hongkong at hobbycity)
Compared to other systems it allows fast integration (the learning curve is less steep as others) because:
- Configuration using a graphical tool (no code compiling required!)
- Only one small PCB that contains RC-receiver inputs, servo outputs and all sensors
Despite this easy use, it is still a powerful tool:
- Complete firmware and software is open source
- Easy to understand: No fuzzy DSP algorithms, all is documented and written using floating points variables using SI units
- SPI and I2C ports available for interfacing external hardware
Main features
- 3 modes:
- Manual
- Stabilized mode (RC-transmitter sets pitch and roll angle)
- Navigation mode (waypoints, circling, basic scripting)
- 6 PWM outputs
- 1 PPM or 5 PWM inputs
- Datalogging (4x per second datalogging) with flight logbook. Results can be exported to Excel or a Google Earth KML
- Real time streaming to Google Earth
A little history

The gluonpilot project is the brainchild of Tom Pycke. After doing a masters thesis on UAV's, his ultimate dream became creating his own UAV.
Many readers followed his weblog for years. After numerous requests, Tom decided to build an all-in-one easy to use autopilot module, the Gluonpilot. Now everybody can play along.
It's design may look simple, but it is actually the result of some years of experimentation.
The very first version
July 2007. My first PCB as well! Using thermopiles. Obviously very challanging for a first one: a 40cm flying wing! Stabilization went very well for the first few minutes.


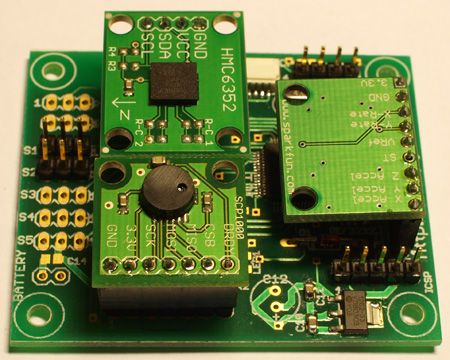
A development board
October 2007. A development board for experimenting with kalman filters. Using a 5DOF from sparkfun:
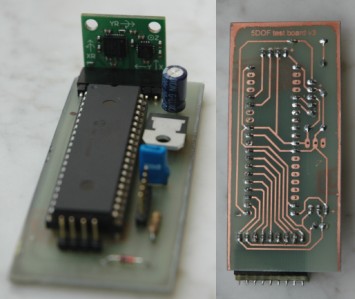
A 2nd design
December 2007. First complete autopilot system. Extremely small. Using a 5DOF. Was very successfull in my easystar :-)

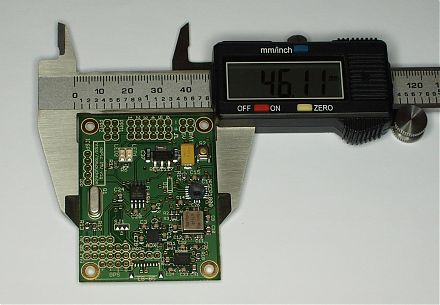
Last non-gluonpilot design
November 2008. Served as the basics for the gluonpilot!
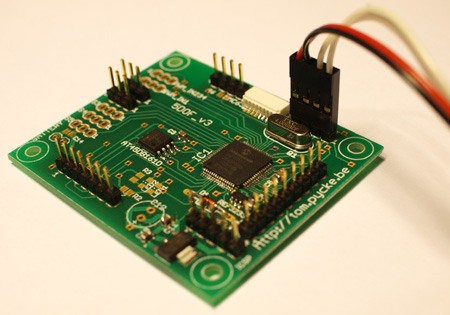
First gluonpilot
September 2009.
First gluonpilot prototype. First 6DOF all-in-one autopilot module.